










Przekładnie zębate
- BRf ™ Przekładnia zębata do suwnic seria 1-26
- BRc ® Przekładnia zębata dwustopniowa
- BRd ™ Przekładnia zębata trzystopniowa
- BRd-X ™ Przekładnia zębata podnoszenia seria 120-320
- BRe-X ™ Przekładnia zębata podnoszenia seria 210-640
- BRj ™ Przekładnia zębata jazdy wózka i suwnicy seria 30-150
- BRjb ™ Przekładnia zębata jazdy suwnic bramowych seria 30-150
- BRj-X™ Przekładnia zębata jazdy wózka i suwnicy seria 90-250
 Pokaż wszystkie
Pokaż wszystkie
- Kabiny sterownicze
- Zblocza linowe hakowe
- Zestawy kołowe
- Chwytaki
- Bębny linowe
- Falowniki
- Przekładnie zębate
- Hamulec szczękowy AHh ™ AHm ™
- Trawersy
- Łączniki
- Jarzma klinowe
- Hamulec HP 2000 ™
- Koła
- Wciągarki WEh ™ WEh-X ™
- Krążki
- System mocowania szyn G-RAIL, klemy zaciski i podkłady
- Liny i zawiesia
- Izolatory Trakcyjne
- Silniki elektryczne
- Suwnice
- Zasilanie suwnic
- Zawiesia Suwnic
- Kleszcze szynowe
- Kotwice
- Wahacze
- Sprzęgła
- Zderzaki
- Szyny dźwignicowe i osprzęt
- Wózki kablowe
- Wygarniacze kołowe
- Wywrotnice wagonowe
- Przesuwnice wagonowe
- Ładowarko-Koparki
- Taśmociągi
- Elektryczne komponenty
- Verlinde wciągniki wciągarki






Opis produktu
Reduktory zębate walcowe do mechanizmów podnoszenia serii BRd-X™ 120 - 320
- Opis
- Oznaczenie reduktora
- Przełożenia reduktora
- Podstawowe dane techniczne
- Współczynnik doboru wielkości reduktora
- Dobór wielkości
- Rysunek katalogowy
- Wymiary
Opis
Nasze nowoczesne reduktory zębate walcowe z serii BRd-XTM należą do najnowszej linii specjalistycznych reduktorów dźwignicowych. Służą one do przełożenia energii silnika we wszelkich napędach mechanizmów podnoszenia.Reduktory BRd-XTM pracują w pozycji wertykalnej, wykorzystując technologię trzystopniową, dzięki czemu posiadają wysoką sprawność na poziomie 0,93. Utrzymują je one w szerokim spektrum temperatur, od -25 do 40 stopni. Elementy reduktorów BRd-XTM wykonane są z wysokiej jakości stali, na nowoczesnych obrabiarkach numerycznych, dzięki czemu wszystkie elementy są ze sobą spasowane według wymagającej tolerancji. Koła zębate trzybiegowego układu mechaniczny, stanowiące serce reduktora są zeszlifowane, co zapewnia cichobieżność całego mechanizmu.
Szeroka gama 12 typów produktów sprawi, iż dopasujemy odpowiadający reduktor do każdego typu sprzętu. Nasze produkty dobieramy podczas rozmowy z klientem, dzięki czemu do jego rąk trafi produkt spełniający nawet najbardziej wyśrubowane wymagania. Korpus reduktora posiada centrowanie na średnicy ØD3 h6. Dzięki cztero- punktowemu gwintowaniu reduktora o wielkości otworu M i długości gwintu LM, zapewnia stabilne i bezpieczne połączenie, nawet przy wysokich obciążeniach silnika. Reduktor mocowany jest przy pomocy śrub pasowych minimalnej klasie 8.8. Ze względów bezpieczeństwa nie należy korzystać z śrub niższej klasy.
NAPĘD DLA REDUKTORA STANOWI SILNIK KOŁNIERZOWY ZASILANY Z PRZETWORNICY CZĘSTOTLIWOŚCI:
- IEC, ns = 1500 obr/min, f=50Hz
- IEC, ns = 1500 obr/min, technika 87Hz
ALTERNATYWNĄ METODĄ ZASILANIA JEST WYKORZYSTANIE SILNIKA DWUBIEGOWEGO:
- IEC, ns = 2900 obr/min, 50Hz
Oznaczenia Reduktora
| BRd-XTM | 210 | - | 100 | - | SB210 | - | V | - | IEC | - | CWE | CWY | - | WS01 | |
| 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
- Typ reduktora: BRd-XTM
- Wielkość reduktora: 210
- Przełożenie nominalne: 100
- Oznaczenie przynależnej piasty bębna: SB210
- Położenie pracy reduktora: V - pionowe, H - poziome
- Przystosowanie do zabudowy silnika kolnierzowego wielkości: IEC 200
- Wyposażony w dodatkowy czop wału wejściowego: CWE
- Wyposażony w dodatkowy czop wału wyjściowego: CWY
- Oznaczenie wykonania specjalnego reduktora (do uzgodnienia z producentem): WS01
ABY DOPASOWAĆ REDUKTOR BRd-XTM DO SILNIKA, W ZAMÓWIENIU NALEŻY PODAĆ:
- Oznaczenie zakupowanego reduktora,
- Grupę klasyfikacyjną mechanicznego podnoszenia, wedlug normy PN-ISO 4301-1 (grupa M, L lub T),
- Moc silnika wyrażoną w kW, Liczbę obrotów na minutę, Wielkość momentu rozruchowego wyrażoną w Nm,
- Moment obrotowy od obciążenia na piaście wału bębna wyjściowego wyrażone w kNm,
- Siłę poprzeczną na piaście wału bębna wyjściowego wyrażoną w kN.
Przełożenia reduktora
A. Zakresy przełożeń nominalnych reduktorów podano w tabeli 1B. Przełożenia rzeczywiste mogą się różnić od nominalnych +/- 5%
- Skontaktuj się z nami w celu otrzymania informacji o rzeczywistej wartości przełożenia dla konkretnej wielkości reduktora.
Podstawowe dane techniczne
TABELA 1
| Nr Reduk. |
Wielkość | Centrala [mm] |
Przełożenia | Maks. moment wyjściowy M2 [kNm] |
Maks. siła poprzeczna Pmax. [kN] |
Masa reduktora z piastą bębna [kg] |
Ilość oleju [l] |
|
| AC | AB | |||||||
| 1 | 120 | 310 | 45 | 40-80 | 2,1 | 30 | 110 | 5,0 |
| 80-120 | 2,3 | |||||||
| 120-180 | 2,5 | |||||||
| 2 | 140 | 335 | 60 | 40-80 | 4,0 | 35 | 160 | 6,0 |
| 80-120 | 4,2 | |||||||
| 120-180 | 4,4 | |||||||
| 3 | 150 | 360 | 60 | 40-80 | 5,0 | 40 | 200 | 7,0 |
| 80-120 | 5,2 | |||||||
| 120-180 | 5,4 | |||||||
| 4 | 160 | 379,99 | 65 | 50-80 | 7,3 | 50 | 250 | 8,0 |
| 80-100 | 7,5 | |||||||
| 100-140 | 7,8 | |||||||
| 5 | 180 | 416,24 | 70 | 50-80 | 9,0 | 55 | 300 | 9,5 |
| 80-100 | 9,2 | |||||||
| 100-140 | 9,5 | |||||||
| 6 | 200 | 4563 | 75 | 50-80 | 11,3 | 60 | 350 | 12,0 |
| 80-100 | 11,5 | |||||||
| 100-150 | 11,8 | |||||||
| 7 | 210 | 465,65 | 95 | 50-80 | 15,8 | 70 | 430 | 16,0 |
| 80-100 | 16,0 | |||||||
| 100-150 | 16,5 | |||||||
| 8 | 240 | 512,83 | 95 | 50-80 | 19,0 | 80 | 560 | 21,0 |
| 80-100 | 20,0 | |||||||
| 100-150 | 21,5 | |||||||
| 9 | 270 | 574,47 | 100 | 50-80 | 25,5 | 90 | 650 | 26,0 |
| 80-100 | 26,0 | |||||||
| 100-150 | 26,5 | |||||||
| 10 | 300 | 651,48 | 100 | 50-100 | 33,0 | 110 | 920 | 30,0 |
| 80-100 | 34,0 | |||||||
| 100-150 | 35,0 | |||||||
| 11 | 320 | 699,67 | 100 | 50-80 | 41,0 | 120 | 1100 | 40,0 |
| 80-100 | 42,0 | |||||||
| 100-150 | 43,0 | |||||||
Współczynniki doboru wielkości reduktora
Podane poniżej wartości współczynników dotyczą napędu mechanizmu silnikiem elektrycznym zasilanym z przetwornicy. Zastosowanie do napędu silników dwubiegowych wcześniejszego uzgodnienia z producentem Zakres temperatur otoczenia -25oC do +40oC. (Możliwe wykonanie reduktora pracującego w innym zakresie temperatur, po wcześniejszym uzgodnieniu).WSPÓŁCZYNNIK fa i fr
Zależne od grupy klasyfikacyjnej mechanizmu, w której pracuje reduktor.
Grupa klasyfikacji mechanizmu w której pracuje reduktor wg ISO 4301:
fa - współczynnik pracy - tabela 2
fr - współczynnik momentu obrotowego - tabela 2
W celu określenia współczynników fa i fr należy przyjąć lub obliczyć współczynnik rozkładu obciążenia Km według opisu poniżej.
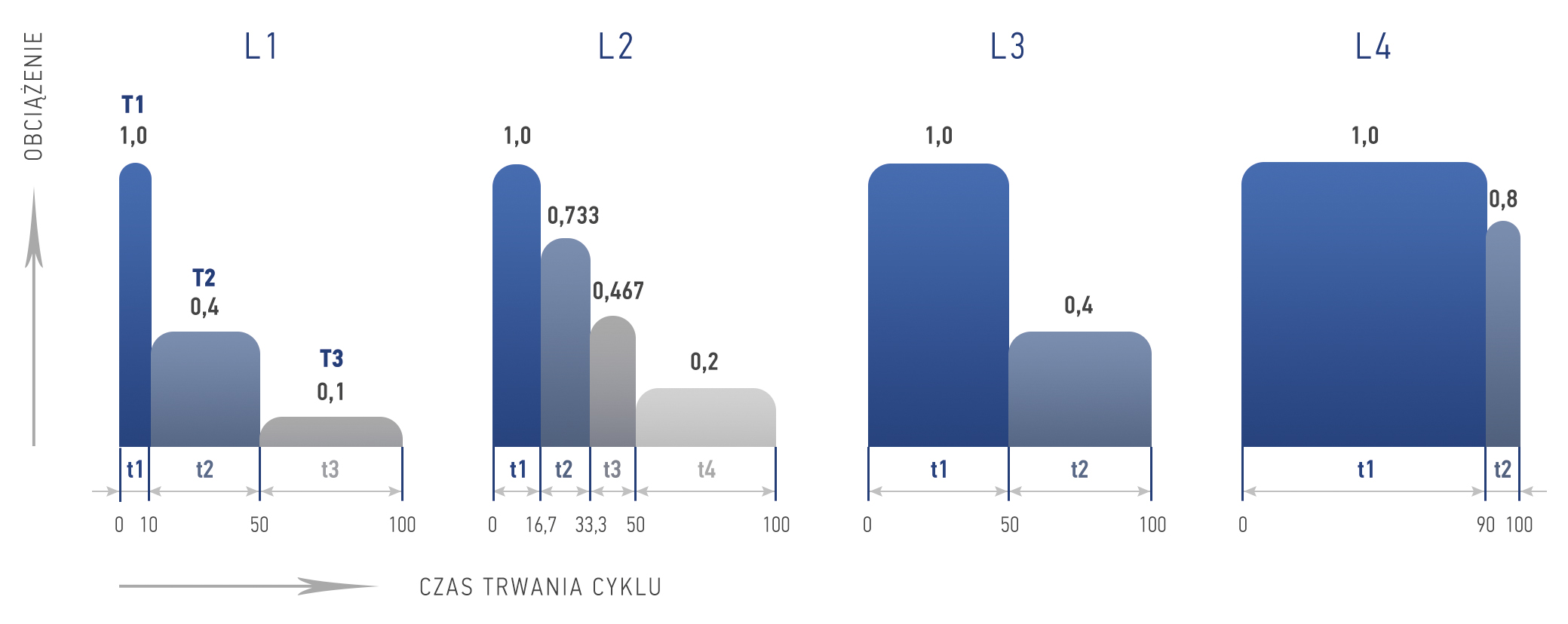
WSPÓŁCZYNNIK ROZKŁADU OBCIĄŻENIA Km
Km = t1/t x (T1/T)3 + t2/t x (T2/T)3 + [...] + ti/t x (Ti/T)3
t1, t2, [...], ti - średni czas użytkowania reduktora przy danym poziomie obiążenia
t - całkowita suma czasów użytkowania
T1, T2, [...]. Ti - wartość obciążenia danego cyklu użytkowania
T - największa wartość obciążenia
Prawidłowo ustalony nominalny współczynnik rozkładu obciążenia reduktora ma następną większą wartość nominalną Km podaną w tabeli 2.
TABELA 2
| Stan obciążenia mechanizmu | Współczynnik Km |
Charakterystyka obciążenia mechanizmu ISO 4301 |
Klasa wykorzystania mechanizmu | ||||||||
| T1 | T2 | T3 | T4 | T5 | T6 | T7 | T8 | ||||
| Całkowity czas użytkowania mechanizmu [godz] | |||||||||||
| 200 do 400 |
401 do 800 |
801 do 1600 |
1601 do 3200 |
3201 do 6300 |
6301 do 12500 |
12501 do 25000 |
25001 do 50000 |
||||
| Grupa klasyfikacyjna mechanizmu | |||||||||||
| L1 Lekki |
0,125 | Mechanizmy podlegające bardzo rzadko maksymalnemu obciążeniu, a przeważnie małym obciążeniom |
M1 | M1 | M2 | M3 | M4 | M5 | M6 | M7 | |
| fa | 0,8 | 0,8 | 0,8 | 0,8 | 0,8 | 0,9 | 1,0 | 1,1 | |||
| fr | 0,5 | 0,5 | 0,5 | 0,5 | 0,5 | 0,55 | 0,65 | 0,7 | |||
| L2 Średni |
0,25 | Mechanizmy podlegające niezbyt często maksymalnemu obciążeniu, a przeważnie przeciętnym obciążeniom |
M1 | M2 | M3 | M4 | M5 | M6 | M7 | ||
| fa | 0,8 | 0,8 | 0,8 | 0,8 | 0,9 | 1,0 | 1,1 | ||||
| fr | 0,5 | 0,5 | 0,5 | 0,5 | 0,55 | 0,6 | 0,65 | ||||
| L3 Ciężki |
0,50 | Mechanizmy podlegające często maksymalnemu obciążeniu, a przeważnie dużym obciążeniom |
M2 | M3 | M4 | M5 | M6 | M7 | |||
| fa | 0,8 | 0,8 | 0,9 | 1,0 | 1,1 | 1,2 | |||||
| fr | 0,5 | 0,5 | 0,5 | 0,5 | 0,55 | 0,56 | |||||
| L4 Bardzo ciężki |
1,00 | Mechanizmy podlegające regularnie maksymalnemu obciążeniu | M3 | M4 | M5 | M6 | M7 | ||||
| fa | 0,8 | 0,9 | 1,0 | 1,1 | 1,3 | ||||||
| fr | 0,5 | 0,5 | 0,5 | 0,55 | 0,6 | ||||||
WSPÓŁCZYNNIK fz
Zależny od liczby załączeń reduktora na godzinę.
TABELA 3
| Liczba zał./godz. | < 10 | 11-60 | 61-150 | 151-200 | 201-300 | |
| fz | ||||||
| Współczynnik fa |
0,8 | 1,0 | 1,0 | 1,1 | 1,15 | - |
| 0,9 | 1,0 | 1,0 | 1,0 | 1,1 | 1,2 | |
| 1,0 | 1,0 | 1,0 | 1,0 | 1,1 | 1,2 | |
| 1,1 | 1,0 | 1,0 | 1,0 | 1,1 | 1,1 | |
| 1,2 | 1,0 | 1,0 | 1,0 | 1,1 | 1,1 | |
| 1,3 | 1,0 | 1,0 | 1,0 | 1,1 | 1,1 | |
Dobór wielkości reduktora
WARUNEK NOMINALNEGO MOMENTU WYJŚCIOWEGO M2 REDUKTORAM2 > Mobc x fa x fx
WARUNEK MOMENTU ROZRUCHOWEGO Mr SILNIKA
Mr x fr in < M2
Mr = 9,55 x Ns/ns x 1,5
Mr = 9,55 x Ns/ns x 1,5
WARUNEK SIŁY POPRZECZNEJ P2 DZIAŁAJĄCEJ NA WAŁ WYJŚCIOWY
P2 < Pmax
MAKSYMALNA MOC WYJŚCIOWA N2 REDUKTORA
Wielkość wyjściowej mocy maksymalnej reduktora wyliczamy z zależności:
N2 = M2 x ns / (in x 9,55)
M2 - nominalny moment wyjściowy reduktora [kNm] tabela 1
N2 - nominalna moc wyjściowa reduktora [kW]
Mobc - moment obciążenia na wale wyjściowym [kNm]
P2 - siła poprzeczna na wale wyjściowym [kNm]
Pmax - maksymalna siła poprzeczna na wale wyjściowym [kNm] tabela 1
Ns - moc silnika elektrycznego [kW]
ns - obroty nominalne silnika [kNm]
Mr - moment rozruchowy silnika [kNm]
in - przełożenie nominalne reduktora
fa, fz, fr - współczynnik doboru tabela 2 / 3
Rysunek Katalogowy
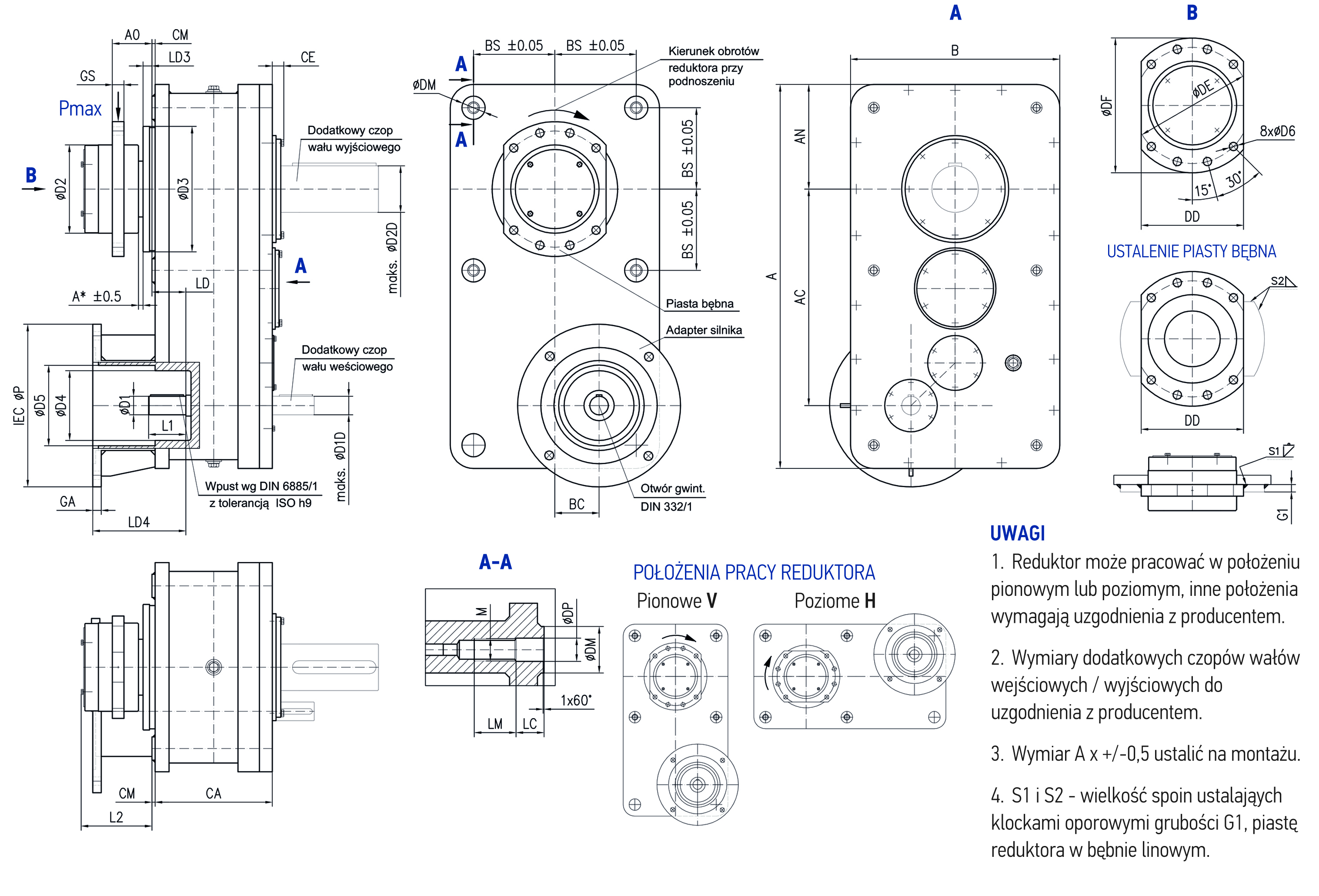
Wymiary
| Nr Redukt. | Wielkość Redukt. |
Reduktory zębate BRd-XTM 120-320 | Wielkość redukt. |
||||||||||||||||||||||||
| AC | BC | A | A* | A0 | AN | B | BS | CA | CE | CM | ØD1h6 | L2 | LD | ØD1D | ØD2h6 | ØD2D | L2 | ØD3h6 | LD3 | M | LC | LM | ØDM | ØDPH7 | |||
| 1 | 120 | 310 | 45 | 535 | 3,5 | 51 | 133,5 | 267 | 105 | 150 | 9 | 4 | 25 | 60 | 28 | 30 | 9 | 45 | 90,5 | 130 | 9,5 | M12 | 16 | 26 | 25 | 13 | 120 |
| 2 | 140 | 355 | 60 | 590 | 8,5 | 58 | 150 | 300 | 115 | 174 | 10 | 5 | 30 | 60 | 3 | 35 | 110 | 60 | 101,5 | 160 | 9,5 | M16 | 16 | 34 | 30 | 17 | 140 |
| 3 | 150 | 360 | 60 | 629 | 8 | 60 | 165 | 330 | 130 | 190 | 9 | 4 | 35 | 60 | 46 | 40 | 130 | 70 | 16,5 | 180 | 9,5 | M16 | 16 | 34 | 30 | 17 | 150 |
| 4 | 160 | 380,99 | 65 | 670 | 10 | 67 | 177 | 354 | 135 | 206 | 12,5 | 5 | 35 | 60 | 54 | 40 | 140 | 80 | 114 | 210 | 13 | M20 | 20 | 35 | 40 | 21 | 160 |
| 5 | 180 | 416,24 | 70 | 730 | 10 | 70 | 195 | 390 | 150 | 214 | 18,5 | 5 | 35 | 60 | 55 | 40 | 150 | 90 | 119 | 230 | 13 | M20 | 20 | 35 | 40 | 21 | 180 |
| 6 | 200 | 453 | 75 | 790 | 10 | 80 | 210 | 420 | 165 | 225 | 20,5 | 5 | 40 | 80 | 55,5 | 45 | 170 | 90 | 133 | 255 | 18 | M24 | 30 | 45 | 50 | 25 | 200 |
| 7 | 210 | 465,64 | 95 | 826 | 10 | 85 | 225 | 450 | 175 | 252 | 25 | 7 | 40 | 80 | 68 | 45 | 190 | 100 | 151 | 270 | 19 | M24 | 30 | 45 | 50 | 25 | 210 |
| 8 | 240 | 512,83 | 95 | 900 | 13 | 90 | 240 | 480 | 190 | 280 | 20,5 | 8 | 45 | 90 | 67 | 50 | 200 | 110 | 151 | 280 | 15 | M24 | 30 | 45 | 50 | 25 | 240 |
| 9 | 270 | 574,47 | 100 | 100 | 13 | 95 | 280 | 560 | 220 | 290 | 20 | 8 | 45 | 90 | 68 | 50 | 210 | 120 | 157 | 300 | 18 | M30 | 35 | 55 | 60 | 32 | 270 |
| 10 | 300 | 651,47 | 100 | 1120 | 16 | 100 | 300 | 600 | 240 | 320 | 25 | 8 | 50 | 110 | 83 | 60 | 240 | 140 | 171 | 350 | 19 | M30 | 35 | 55 | 60 | 32 | 300 |
| 11 | 320 | 699,66 | 100 | 1190 | 16 | 100 | 320 | 640 | 250 | 336 | 30 | 8 | 50 | 110 | 90 | 60 | 250 | 150 | 177 | 380 | 17 | M36 | 40 | 60 | 80 | 38 | 320 |
| Wielkość Reduktora |
Adaptery Silników | |||||
| IEC | ØP | LD4 | ØD4 | ØD5 | CD | |
| 120 | 112 | 250 | 140 | 140 | 80 | 15 |
| 132 | 300 | 166 | 166 | |||
| 160 | 350 | 196 | 196 | 18 | ||
| 180 | 350 | 198 | 198 | |||
| 140 | 132 | 300 | 166 | 166 | 88 | 15 |
| 160 | 350 | 196 | 196 | |||
| 180 | 350 | 198 | 198 | 18 | ||
| 150 | 132 | 300 | 165 | 165 | 98 | 18 |
| 160 | 350 | 196 | 196 | |||
| 180 | 350 | 198 | 198 | |||
| 160 | 132 | 300 | 166 | 166 | 110 | 18 |
| 160 | 350 | 196 | 196 | |||
| 180 | 350 | 198 | 198 | |||
| 180 | 160 | 300 | 166 | 166 | 114 | 18 |
| 180 | 350 | 196 | 196 | |||
| 200 | 350 | 198 | 198 | |||
| 200 | 160 | 350 | 216 | 216 | 127 | 18 |
| 180 | 350 | 216 | 216 | |||
| 200 | 400 | 220 | 220 | |||
| 210 | 160 | 350 | 216 | 130 | 173 | 18 |
| 180 | 350 | 218 | ||||
| 200 | 400 | 220 | ||||
| 240 | 180 | 350 | 228 | 145 | 173 | 18 |
| 200 | 400 | 230 | ||||
| 225 | 450 | 265 | 199 | 20 | ||
| 270 | ||||||
| 270 | 180 | 350 | 228 | 146 | 173 | 18 |
| 200 | 400 | 230 | ||||
| 225 | 450 | 265 | 199 | 20 | ||
| 270 | ||||||
| 300 | 200 | 400 | 250 | 170 | 173 | 18 |
| 225 | 450 | 285 | 199 | 20 | ||
| 290 | ||||||
| 250 | 550 | 290 | 219 | 25 | ||
| 280 | 550 | 290 | 219 | 25 | ||
| 320 | 200 | 400 | 250 | 180 | 173 | 18 |
| 225 | 450 | 285 | 199 | 20 | ||
| 290 | ||||||
| 250 | 550 | 290 | 253 | 25 | ||
| 280 | 550 | 290 | 253 | 25 | ||
| Wielkość Reduktora | Piasty bębnów | |||||||
| DDh3 | ØDE | ØDF | ØD6 | GS | G1 | S1 | S2 | |
| 120 | 105 | 120 | 140 | 16 | 16 | 8 | 4 | 4 |
| 140 | 120 | 140 | 160 | 16 | 16 | 8 | 4 | 5 |
| 150 | 150 | 170 | 195 | 16 | 16 | 10 | 5 | 6 |
| 160 | 160 | 180 | 210 | 18 | 18 | 12 | 6 | 6 |
| 180 | 170 | 190 | 220 | 20 | 20 | 14 | 6 | 8 |
| 200 | 190 | 220 | 250 | 22 | 22 | 16 | 8 | 10 |
| 210 | 220 | 250 | 297 | 25 | 25 | 20 | 8 | 10 |
| 240 | 230 | 260 | 300 | 28 | 28 | 20 | 8 | 10 |
| 270 | 240 | 270 | 310 | 28 | 28 | 20 | 8 | 10 |
| 300 | 250 | 300 | 340 | 30 | 30 | 20 | 8 | 10 |
| 320 | 270 | 310 | 350 | 30 | 30 | 20 | 8 | 10 |
CENTRUM PROJEKTOWO-WDROŻENIOWE DETRANS Spółka z o.o.w Zabrzu jest kontynuatorem zadań realizowanych przez zlikwidowany instytut badawczy Ośrodek Badawczo-Rozwojowy Dźwignic i Urządzeń Transportowych "Detrans".
Realizuje prace projektowe i wdrożeniowe w zakresie zaawansowanych technologii z obszarów: budowy i eksploatacji dźwignic, maszyn przeładunkowo-transportowych, ochrony środowiska, inżynierii systemów oraz metodologii badań naukowych w tym zakresie.
Realizuje prace projektowe i wdrożeniowe w zakresie zaawansowanych technologii z obszarów: budowy i eksploatacji dźwignic, maszyn przeładunkowo-transportowych, ochrony środowiska, inżynierii systemów oraz metodologii badań naukowych w tym zakresie.
DETRANS Spółka z o.o. opracowuje dokumentacje techniczne różnych rodzajów dźwignic, zawiesi, urządzeń i maszyn przeładunkowych i transportowych. Spółka wyspecjalizowała się przede wszystkim w dźwignicach. Opracowywane są typoszeregi podstawowych elementów dźwignic jak sprzęgła, hamulce, koła jezdne, zderzaki, zblocza, jarzma linowe, łączniki różnicowe i wiele innych wynikających z potrzeb klientów.
